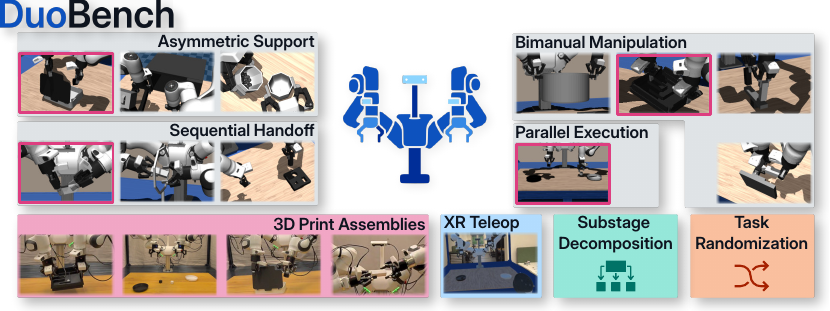
Overview of DuoBench: four bimanual task categories with eleven tasks, four replicated in the real world, and a stage-based evaluation protocol for diagnosing failure modes beyond binary success.
Bimanual robot systems substantially expand manipulation capabilities, but coordinating two arms introduces additional control complexity and failure modes that are not well captured by existing benchmarks. We introduce DuoBench, an extensible benchmarking framework for bimanual manipulation on the Franka Research 3 Duo platform. DuoBench comprises eleven tasks spanning four coordination categories, implemented in simulation and partially reproduced in the real world through reproducible task recipes with 3D-printable assets. In addition, it provides stage-based evaluation for fine-grained semantic failure analysis beyond binary success and human-teleoperated datasets for all benchmark tasks. Across dual-arm imitation-learning and vision-language-action baselines, DuoBench exposes persistent difficulty in early interaction stages, parallel arm execution, and transfer between simulation and real-world settings.
Existing manipulation benchmarks still provide limited support for systematically evaluating dual-arm coordination. They often underrepresent the diversity of coordination patterns required by two-arm manipulation, provide little support for reproducible sim-and-real evaluation, or rely mainly on binary task success.
That makes it hard to tell whether failures come from grasp acquisition, stabilization, object transfer, parallel execution, or later semantic stages of the task.

DuoBench is built around the Franka Research 3 Duo setup and exposes the same benchmark logic through a shared environment interface for simulation, teleoperation, replay, and evaluation.
The goal is not just to report whether a policy succeeds on a single lab setup, but to make the benchmark itself reproducible across labs. Tasks can be recreated in simulation and, for a subset, in the real world with 3D-printable assets and shared teleoperation tools.
duobench/<task_id> Gymnasium environmentsOne arm stabilizes or holds an object while the other performs the task-relevant interaction.
Hinge-Chest, Spring-Door, Pour-Marbles
Both arms jointly manipulate the same object in a tightly coupled way.
Ball-Maze, Carry-Pot, Block-Balance, Join-Blocks
The object must be transferred between arms due to workspace or task constraints.
Transfer-Cube, Transfer-Gate, Transfer-Reorient
Both arms solve largely independent subproblems without direct physical cooperation.
Bin-Sort
The table below summarizes the benchmark tasks, their environment IDs, and their language instructions. The previews keep their native aspect ratio.
| Task image | Paper task ID | Task description | Env ID string | Language instruction |
|---|---|---|---|---|
Ball-Maze |
Pick up a maze board with both arms and tilt it so a ball rolls into a target region. | duobench/ball_maze |
pick up the board and tilt it so the ball rolls onto the red square |
|
Bin-Sort |
Sort two cubes into the matching bowls, testing simultaneous execution instead of direct cooperation. | duobench/bin_sort |
use the left arm to place the white cube in the white bowl; use the right arm to place the black cube in the black bowl |
|
Block-Balance |
Place a beam on a support cube and then place two rectangular blocks on the beam simultaneously. | duobench/block_balance |
place the beam on the cube and then place the other blocks on the beam simultaneously using one arm for each cube |
|
Carry-Pot |
Carry a pot using both side handles and place it on a stove. Both arms are needed to lift the pot. | duobench/carry_pot |
use two arms to carry the pot at the handle on the stove |
|
Hinge-Chest |
Holding the lid of a small chest open while inserting a box. One arm must hold the lid while the other inserts the box. | duobench/hinge_chest |
open the box with the right arm and place the cube inside the box with the left arm |
|
Join-Blocks |
Connect two movable blocks together and then attach them to a peg on a third stationary block. | duobench/join_blocks |
join the two blocks using the peg on the left block and join the free socket of the right block with the peg on the wall |
|
Pour-Marbles |
Two cups, one containing marbles. Both cups must be picked up, and the marbles must be poured into the other cup before both cups are placed back. | duobench/pour_marbles |
grasp and lift both cups, then pour the marbles from one cup into the other and place the cups back to their original location inside the green square |
|
Spring-Door |
A spring-loaded microwave door requires one arm to hold it open while the other inserts a box. | duobench/spring_door |
use the left arm to open the microwave door, then use the right arm to place the box inside the microwave, and close the door again |
|
Transfer-Cube |
Hand over a cube between arms before placing it into a bowl. | duobench/transfer_cube |
grasp the white cube with the right arm, hand it over to the left arm and place it in the white bowl with the left arm |
|
Transfer-Gate |
Hand over a box between arms before placing it onto a mat. The box has to be passed through a gate. | duobench/transfer_gate |
use the right arm to pick up the white box, and hand it over to the left arm through the hoop, then place it on the green mat with the left arm |
|
Transfer-Reorient |
The right arm picks up a peg and hands it over to the left arm so that the left arm can insert it into a socket. | duobench/transfer_reorient |
grasp the block with the right arm, hand it over to the left arm such that the left arm can easily insert the piece later, then insert the block into the socket with the left arm |
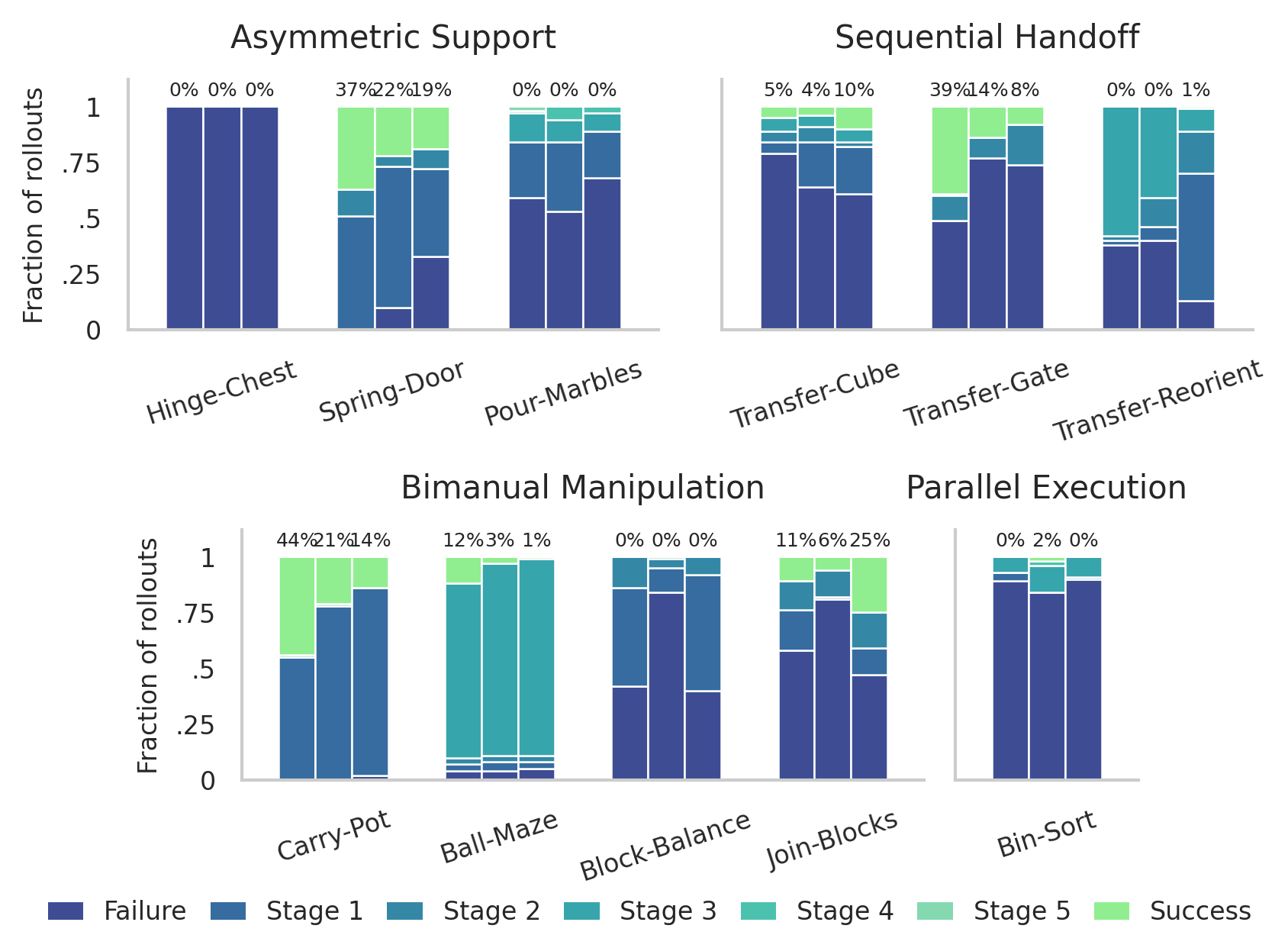
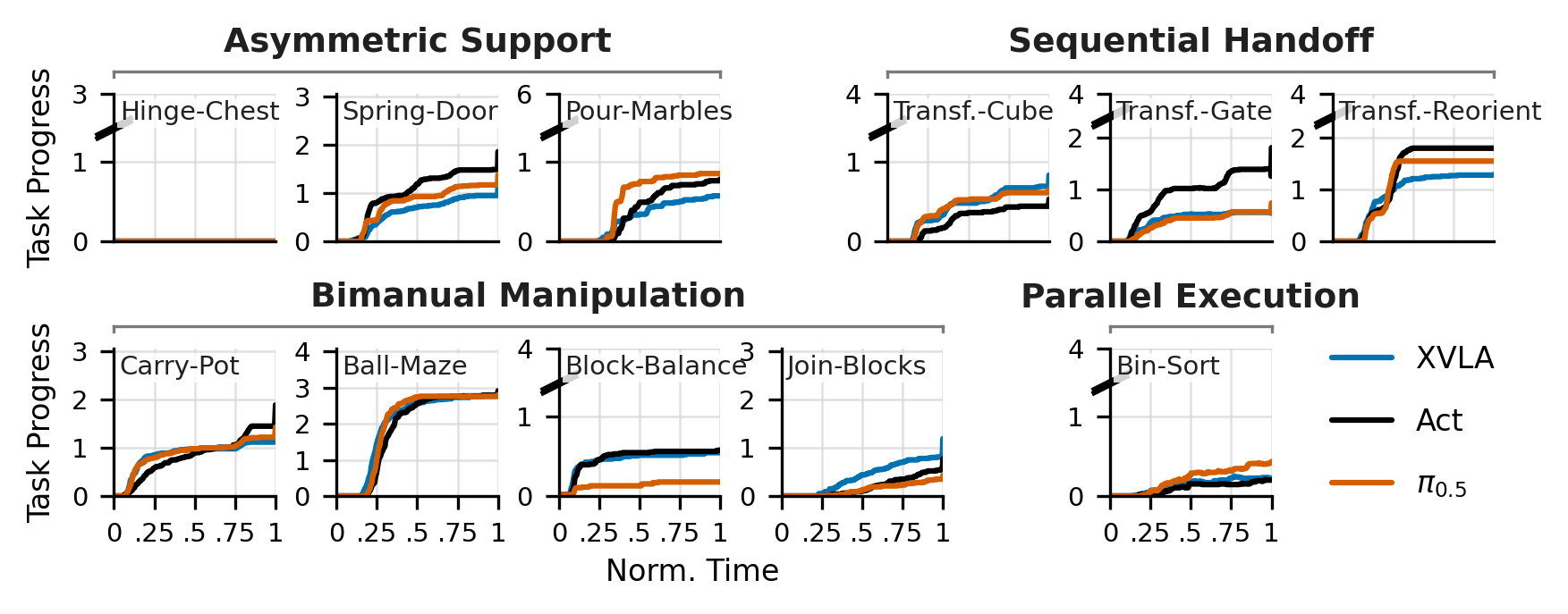
DuoBench is challenging for current dual-arm policies. Across the full set of 11 simulation tasks, the benchmark remains far from saturated across all evaluated baselines.
The stage-based analysis is particularly useful because many failures happen in the earliest interaction phases, especially grasp acquisition and initial task setup. The benchmark also reveals meaningful differences between tasks that look similar at a high level but differ substantially in execution difficulty.
Parallel execution is especially difficult: Bin-Sort remains a weak point across policies, suggesting that independent yet coordinated control of both arms is still far from solved.
Mixed simulation-and-real training can help on some real-world tasks, but the sim-to-real gap remains clearly visible. That makes DuoBench useful not only for comparing policies within a domain, but also for studying transfer strategies and data-mixing choices.
Real-world evaluation on the four replicated tasks shows the same overall pattern as simulation. Many failures happen early, with grasping and initial setup remaining the dominant bottlenecks. At the same time, once grasping succeeds, later stages are often completed reliably, especially in tasks such as Transfer-Cube and Bin-Sort.
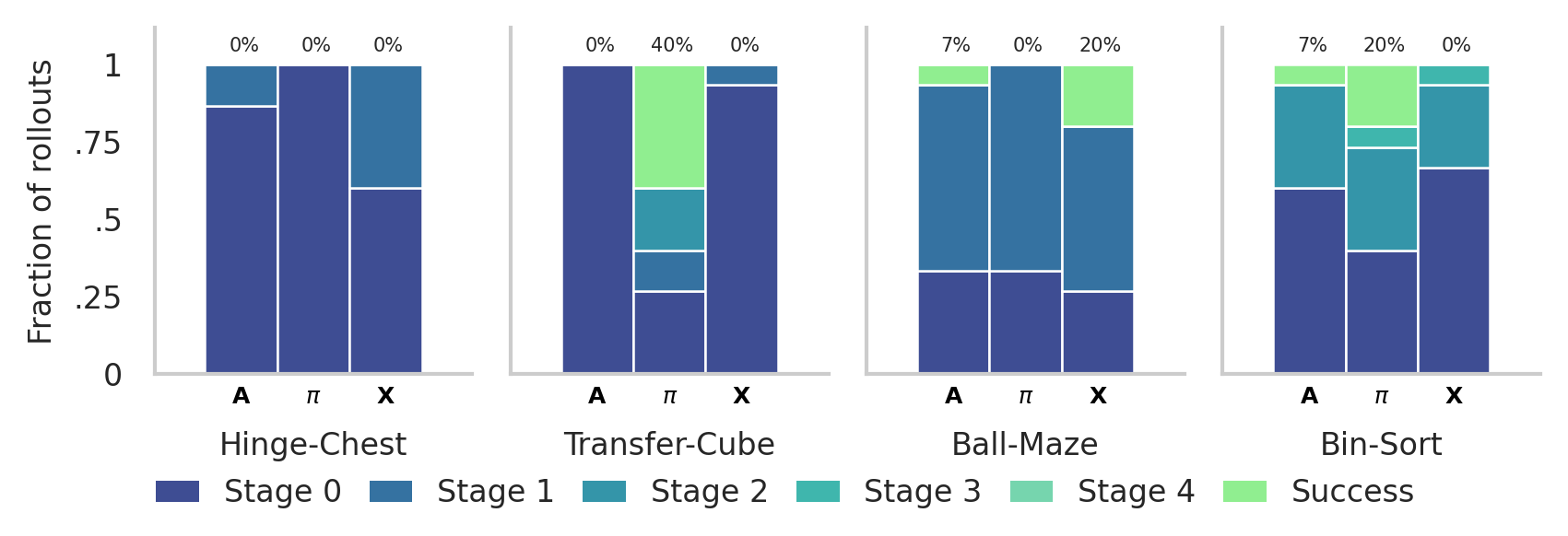
These qualitative rollouts make the benchmark failure modes more concrete: some runs succeed once the initial interaction is correct, while others stall immediately at grasping, setup, or coordinated follow-through.
@misc{duobench,
title={{DuoBench}: A Reproducible Benchmark for Bimanual Manipulation in Simulation and the Real World},
author={Tobias J{\"u}lg and Seongjin Bien and Simon Hilber and Yannik Blei and Pierre Krack and Maximilian Li and Sven Parusel and Rudolf Lioutikov and Florian Walter and Wolfram Burgard},
year={2026},
url={https://arxiv.org/abs/2606.11901}
}